Study of Some Particular Movements: Rectilinear and in-Planar Movements
Rectilinear Movement
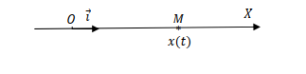
A movement is rectilinear if the trajectory[1] followed by the mobile is a straight line. The position M of the mobile is identified by the position vector[2]
Position Vector
If the movement is linear along Ox
Instantaneous velocity vector
Instantaneous acceleration vector
Fundamental :
We have two types of rectilinear motion: uniform rectilinear motion and uniformly varied rectilinear motion
Uniform rectilinear movement: uniform rectilinear motion is characterized by a constant speed and therefore the acceleration is zero.
Uniformly varied rectilinear movement: uniformly varied rectilinear motion is characterized by constant acceleration.
Note :
If we have:
⇒ the movement is uniformly accelerated
⇒ the movement is uniformly delayed
Planar Movement
If the trajectory of the mobile is in planar, we study the movement following the Cartesian coordinates (), the polar () or curvilinear coordinates , in this section we choose the curvilinear coordinates.
Curvilinear movement is characterized by a curvilinear trajectory which requires knowledge of the radius of curvature R and the center C.
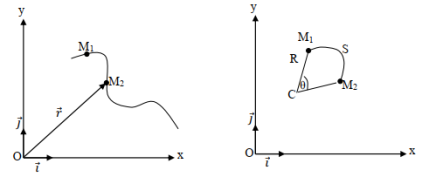
Definition :
The curvilinear coordinates is a base connected to the mobile in curvilinear motion. It is defined by the orthonormal base such as
: is a unit vector tangential to the trajectory and in the direction of movement
: is perpendicular to the vector , and it is directed towards the center of the curvature of the trajectory (the concavity of the trajectory).
Method :
Position vector
The position of the mobile is determined by the curvilinear abscissa S such that
S is the length of the arc between the two points M(1) and M(2)
Instantaneous velocity vector
Instantaneous acceleration vector