Position, Velocity and Acceleration Vectors
Position Vector
The position of a mobile at a time t is determined with respect to a reference frame by a vector which is called the position vector. Its origin is the center of the frame O and its end is the mobile M[1]
Displacement Vector
We define the vector the displacement vector
Velocity Vector
Average speed
The average speed is defined as follows
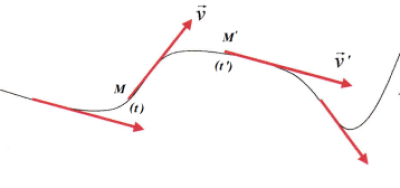
Instant velocity
It is the velocity at a given time t and it is defined as follows
The instantaneous velocity vector is tangent to the trajectory and its direction follows the direction of movement.
Acceleration Vector
Average Acceleration
Average acceleration is the change in speed between two positions with respect to time. The mobile undergoes an average acceleration such that
is the speed of the mobile at time and its speed at time
Instant Acceleration
Instantaneous acceleration is the acceleration at a given time t